3 - Deposite las canicas

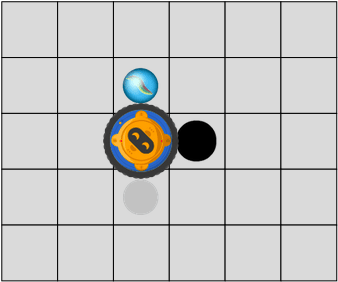
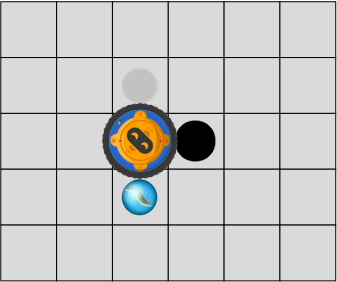
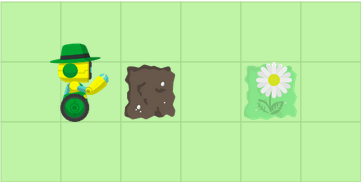
Programe el robot para que recoja la canica y colóquela en el agujero (en negro).
Necesitará:
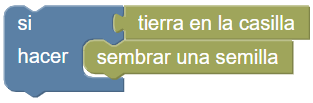
Si aún no ha descubierto este bloque, haga clic en "Mostrar más información" para obtener una introducción.
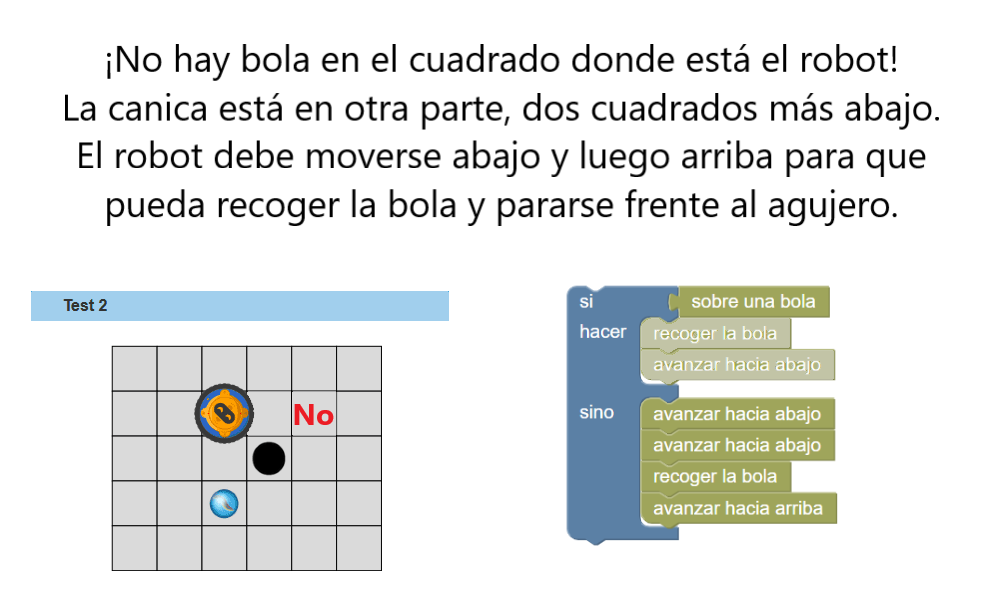
Este bloque se utiliza para controlar el robot de forma diferente según se cumpla o no una condición.
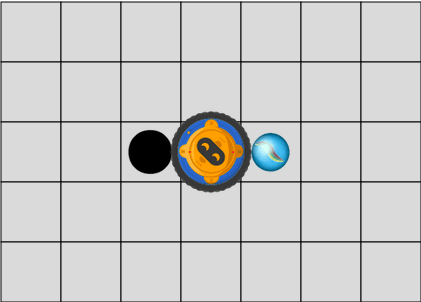
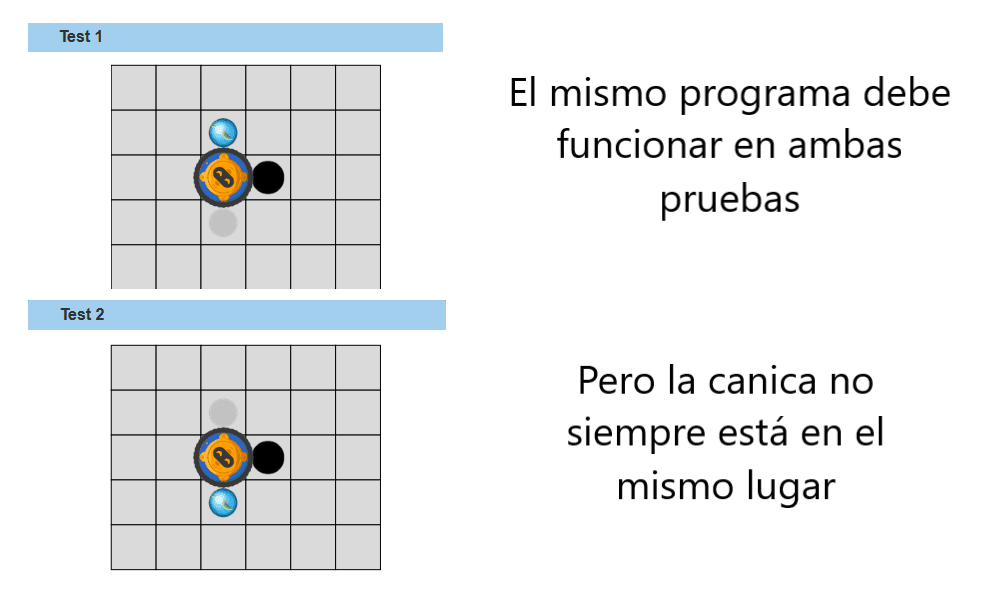
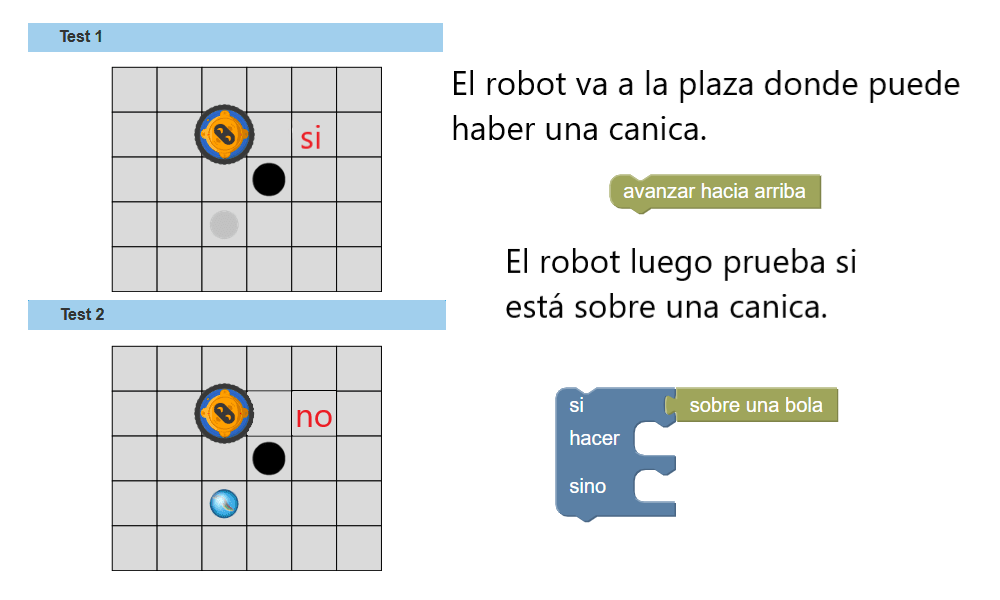
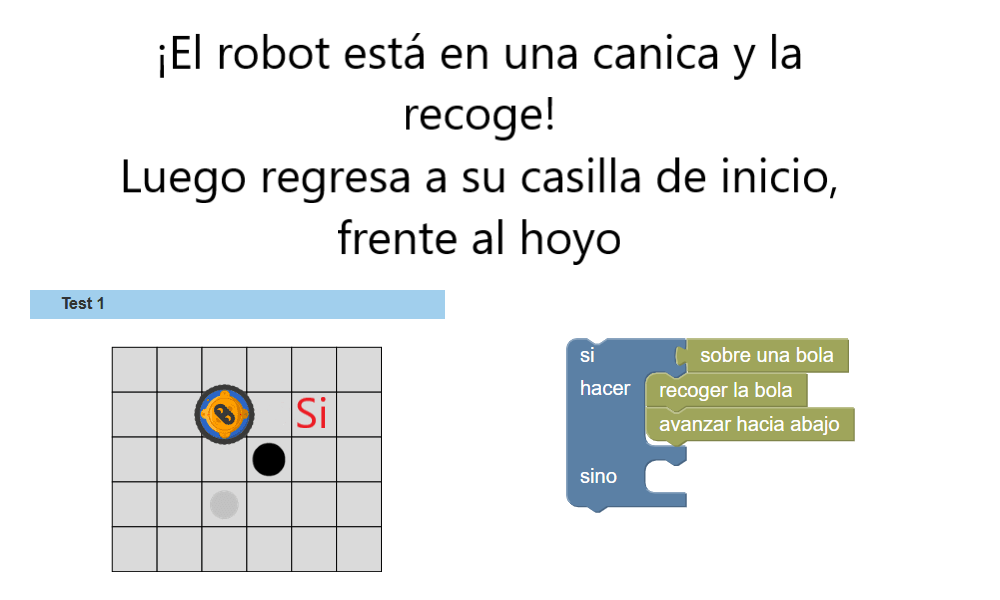
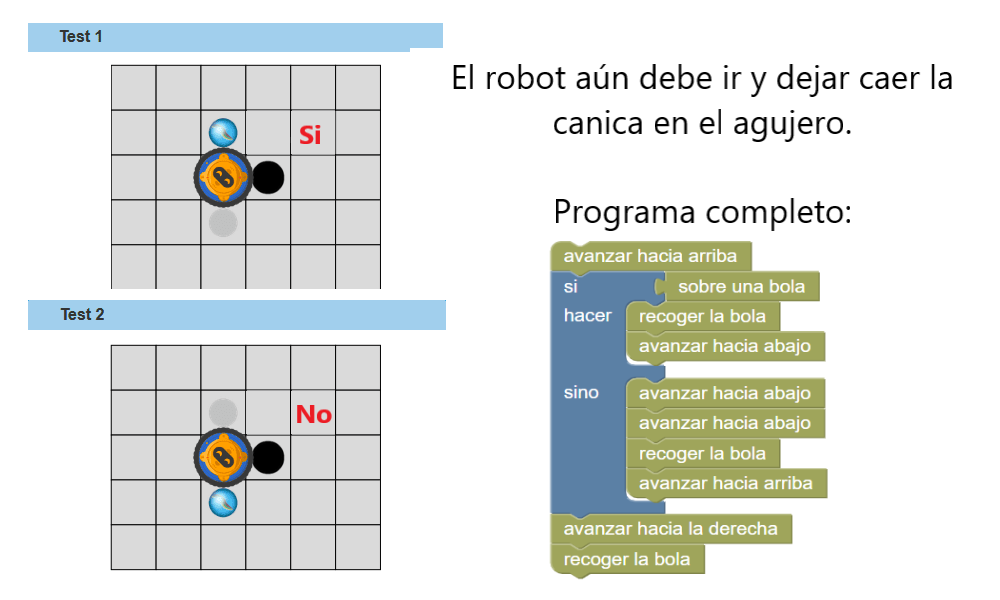
Demostración:
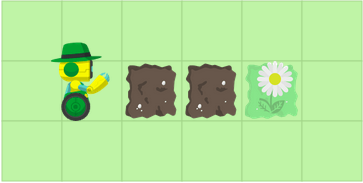
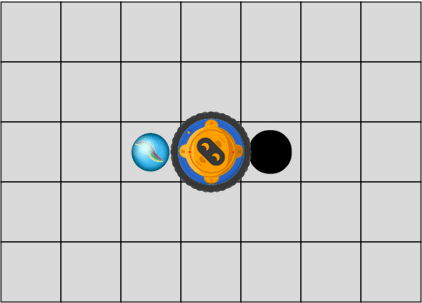
Programe el robot para que recoja cada una de las canicas y las coloque en un agujero (una canica por agujero).
El robot solo puede transportar una canica a la vez.
Si esta versión es demasiado difícil, resuelva primero la versión de 1 estrella . Para acceder a él, haga clic en la pestaña en la parte superior izquierda .